Bin Picking - solution for real smart warehouses
02.11.2021
What is bin picking and where it is used?
Bin picking is an automated process that involves collecting parts (one at a time) from a container, which contains bulk / bulk parts. Depending on the purpose for which the parts are collected, we will define several types of robotic applications. In a later article, Mach FTD will present a detailed custom-made bin picking application.
Bin picking applications can be used in the following areas:
• Packaging - collection of parts from the container, depositing them in boxes or on pallets that go on the conveyor to be sealed, wrapped, strapped
• Product identification - collecting parts and depositing them on special supports for marking (micro percussion, laser)
• Assembly - product components are collected by robot and placed in precise locations that lead to the assembly of the final product
• Sorting - parts of several types, mixed in a container need sorting for other processes (packaging, marking, assembly)
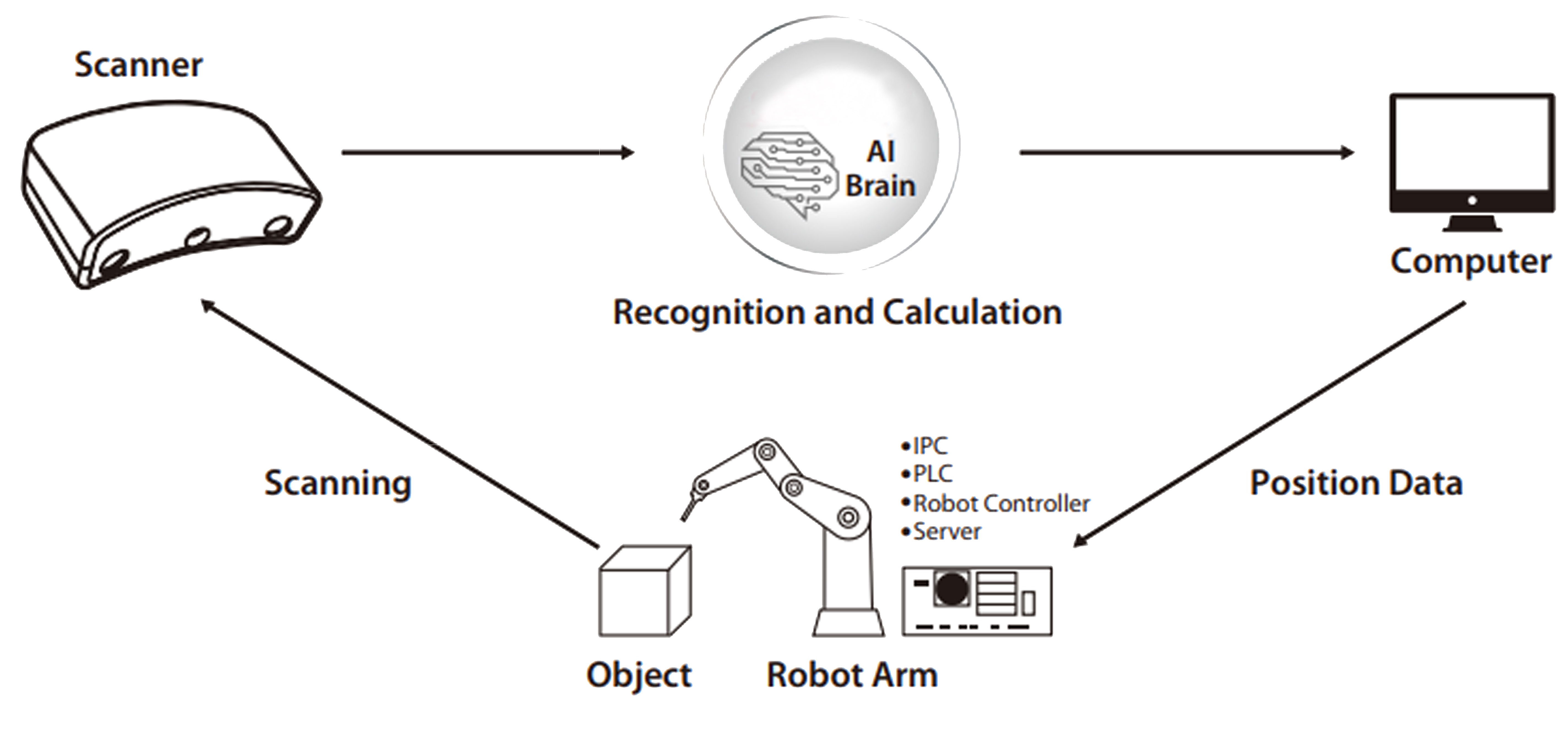
From the point of view of the constituent elements, a bin picking application consists of:
• Robot with gripper (made according to the pieces to be collected)
• 3D vision technology with advanced image processing (artificial intelligence systems that extract and process information from images)
• 3D vision system consisting of sensors, cameras, and optional laser projectors
• Container
• Conveyor (optional, depending on the application)
• Other adjacent industrial equipment (laser for marking, or micro percussion equipment, complete systems for packaging (formers, box sealers), equipment for packaging product groups (product layer / layers, pallets)
It is important to note that although the process is automated and involves an industrial robot, there are other constitutive elements of the applications that are crucial in bin picking and that determine the type of application. Of great importance are the Vision systems which are of two types, respectively 2D and 3D. Vision 2D detection systems involve the identification of pieces on a flat surface, in specific light conditions, based on known information (shape of the piece, location of the piece to be collected, location of the piece to be deposited). Vision 3D detection systems can locate several types of mixed pieces, after which they can send the robot to any corner of the container and to several storage locations. It is important to note that Vision 2D systems are priced lower than Vision 3D systems.
Bin picking is not a new in the field of industrial engineering, but it is a challenging field. These challenges relate to:
• Optimal identification of objects to be collected by image analysis, especially when objects are of different shapes, colors and sizes
• The gripper picking technologies (the best technologies are those that involve the use of vacuum and "fingers")
• The number of moves of the robot arm, inside the container so that no uncollected parts remain
• Collecting, classifying and depositing the object in boxes that arrive for storage or delivery at different points, as well as recording the location of the object
• Setting the tactical strategies of the applications, namely focusing on the successful collection of pieces by the robot or short execution times
• Setting recovery strategies for gripper collection errors
• Low number of collection errors due to product features (products that stick together, or slip easily)
• Correction strategies for the robot when it is faced with unknown and non-compliant pieces
The bin picking process has been developed to streamline the manual collection process in various industries and to protect employees. Thus, people are protected from accidents such as cutting, accidental stinging during handling, inhalation of dust specific to heavy industries, deterioration of physical and mental health caused by repetitive long-term work. If we refer to the efficiency of the production or handling process, this results in a number of collections / deposits of parts in a shorter time, without downtime.
The collection of pieces determines the type of bin picking. Thus, there are requirements for collecting parts in a structured, semi-structured and random way. Specific to the structured collection is the 2D vision system. The 3D system is used for semi-structured and random collection. Choosing a structured or a random solution does not necessarily indicate technological efficiency, but the type of requirement. Thus, there are applications that do not require complex Vision systems.
What industries use bin picking?
Bin picking is mainly used in the automotive industry, in intralogistics - warehouses, and the pharmaceutical industry, although it can be used in any industry. However, bin picking is used especially where there are risks and / or high costs for using human resources.
The industry that has been most open and uses bin picking is the automotive industry and more specifically the suppliers of parts and components that are used in the manufacture of automobiles, but not only. Thus, the requirements are specific to companies that produce and distribute parts to major manufacturers in the automotive industry or specialty stores. Below are 2 examples of companies that use bin picking (companies are part of case studies; they are not in Mach Ftd's client portfolio).
KYB Americas Corporation is a company that it specialized in the production of shock absorbers and similar components. It needed to automate the collection of several types of container parts (metal cylinders, shock absorbers, screws, wheels, tires, engine cylinders, connectors, gears, crankshafts, nuts, etc.) and place them in the same position, each time on the conveyor. The challenge of this application was given by the characteristics of the parts, namely the slightly different diameter of the parts on their side. The bin picking application is random with Vision 3D system.
GKN Automotive is the primary supplier of parts for the car's running system. Specific parts of the gearboxes must go through 50 types of equipment in order to complete the production process, which involves transporting the parts from one piece of equipment to another. In this case, the bin picking process involved either collecting the parts from a container, randomly, or collecting and depositing them in a structured way, depending other processing steps.
What is the difference between pick & place and bin picking?
Pick & place is a process that involves identifying a single type of object (size, color, fixed materials) and picking it from a known, fixed and default location and positioning it in another known, fixed and default location. This process requires only a 2D Vision system and can be performed under controlled environmental conditions (light, work surface, location and position of objects, other technical parameters).
Bin picking is a complex and more flexible process than pick & place. Bin picking includes the following actions:
• Identify several types of objects from a multitude of mixed objects that have different positions
• Establishing the route for the robot to execute depending on the type of object so that positioning allows multiple locations (some objects can end up in boxes, while others end up on the conveyor for other production processes)
• Placing objects in predetermined, varied positions
• Carrying out all the above steps without altering the products
Mach Ftd can provide Romanian companies with bin picking applications, as it has the technology, knowledge, and suppliers necessary to make such applications. In the present, in Romania this type of application is used very rarely, or not at all. However, the introduction of bin picking in factories or warehouses offers several benefits:
• Reducing human resource costs and streamlining the use of human resources in those processes where automation cannot be introduced
• Reduction of losses caused by alteration of parts
• Reduction of losses caused by downtime or human errors
• Development of production by introducing a process that is otherwise outsourced
• Achieving product traceability
• Reducing the costs required to outsource the various production processes (sorting, packaging)
• Increasing sales through optimal and varied offer (objects reach the number, shape of packaging and the quality desired by the customer)
• Improving the ergonomics of the production line leading to a safe and friendly working environment for employees
• Reducing labor security costs (no more people involved, no equipment and other expensive protection measures are needed)
* The terms used in English in this article have correspondents in Romanian but are rarely used in the field of industrial engineering, having a large meaning that is difficult to present specific industrial processes and actions in the field.